潜水士の死闘を代行するロボットはいつ頃?…セウォル号で見た海洋ロボットの現実(1)
ⓒ 中央日報/中央日報日本語版2014.05.20 13:35
旅客船「セウォル号」沈没事故から35日目を迎えた。今回の惨事は科学界にも多くの悩みを残した。1カ月以上続く潜水士の死闘を見守る人たちは、「いつまでこんな危険な作業を人の手に任せるのか」という質問を投げかけた。捜索を支援するために珍島に駆けつけた科学者も同じ思いを抱いた。事故現場投入1カ月で撤収するクラブスター(Crabster)の事例を通じて、海洋ロボット開発の夢と現実をチェックした。
「事故発生から22日、クラブスターが彭木(ペンモク)港に投入されてから17日。(中略)この悲しい事故の収拾に少しでも力になろうと睡眠もあまり取らずに努力してきたが、まだ大きな力になれない私たちは…」。
海洋ロボットは大きく3つに分けられる。遠隔制御無人潜水艇(ROV)と自律型無人潜水艇(AUV)、そしてクラブスターのような海底歩行ロボットだ。ROV・AUVはともにプロペラ推進方式。ROVは母船からケーブルで調整する半面、AUVは事前にプログラミングされた経路に沿って自律航走するのが違いだ。
1988年に米国はROVで、19世紀に東部海岸に座礁した船から1億-1億5000万ドルの金塊を引き揚げした。2011年に大西洋深海4000メートルに沈んだエールフランス447旅客機を発見した主人公もREMUS6000というAUVだった。3月に行方不明となったマレーシア航空370便を探すのにもブルーフィン21というAUVが使用されている。
しかしROVとAUVには短所がある。潮流が1ノット(秒速約0.5メートル)を超えれば力を発揮できない。また、相当数のROVとAUVが光学カメラだけを備えていて、視界が悪ければ活動が制約される。セウォル号事故海域がまさにこうした環境だった。潮流の速度が最高4-5ノットで、視界は20センチにすぎない。ここに投入された外国ROV(米国のビデオレイ、カナダのディープトレッカー )は役立たなかった。
一方、クラブスターは孟骨(メンゴル)水道の潮流に耐えることができた。実際、カニやロブスターのように体を海底にくっつけたまま動いたからだ。チョン・ボンファン博士は「頭は低くし、後部を高めて抵抗を最小化できる」と述べた。クラブスターはKRISOのROVヘミレより少し小さいだけだが(横2.42メートルx縦2.45メートルx高さ1.3メートル)、体に受ける抵抗力は約4分の1(流速4ノットで約200キログラム)にすぎない。
しかしなぜ鮮明な映像を得られなかったのか。クラブスターは約67メートル離れたところからスキャニングソナーでセウォル号の姿を撮った。このソナーは最大距離が150メートルで、水平面スキャンのみ可能だ。研究チームは1次調査が終った後、クラブスターに垂直方向のスキャンもできるよう同じ性能のソナー1台を追加で設置した。撮影距離が15メートルの超音波カメラを補完できるマルチビームソナー(最大距離50メートル)も追加した。しかし海洋警察はクラブスターがセウォル号に接近することを許可しなかった。母船が衝突する可能性があるからだ。
潜水士の死闘を代行するロボットはいつ頃?…セウォル号で見た海洋ロボットの現実(2)
【特集】韓国旅客船「セウォル」沈没事故
「事故発生から22日、クラブスターが彭木(ペンモク)港に投入されてから17日。(中略)この悲しい事故の収拾に少しでも力になろうと睡眠もあまり取らずに努力してきたが、まだ大きな力になれない私たちは…」。
海洋ロボットは大きく3つに分けられる。遠隔制御無人潜水艇(ROV)と自律型無人潜水艇(AUV)、そしてクラブスターのような海底歩行ロボットだ。ROV・AUVはともにプロペラ推進方式。ROVは母船からケーブルで調整する半面、AUVは事前にプログラミングされた経路に沿って自律航走するのが違いだ。
1988年に米国はROVで、19世紀に東部海岸に座礁した船から1億-1億5000万ドルの金塊を引き揚げした。2011年に大西洋深海4000メートルに沈んだエールフランス447旅客機を発見した主人公もREMUS6000というAUVだった。3月に行方不明となったマレーシア航空370便を探すのにもブルーフィン21というAUVが使用されている。
しかしROVとAUVには短所がある。潮流が1ノット(秒速約0.5メートル)を超えれば力を発揮できない。また、相当数のROVとAUVが光学カメラだけを備えていて、視界が悪ければ活動が制約される。セウォル号事故海域がまさにこうした環境だった。潮流の速度が最高4-5ノットで、視界は20センチにすぎない。ここに投入された外国ROV(米国のビデオレイ、カナダのディープトレッカー )は役立たなかった。
一方、クラブスターは孟骨(メンゴル)水道の潮流に耐えることができた。実際、カニやロブスターのように体を海底にくっつけたまま動いたからだ。チョン・ボンファン博士は「頭は低くし、後部を高めて抵抗を最小化できる」と述べた。クラブスターはKRISOのROVヘミレより少し小さいだけだが(横2.42メートルx縦2.45メートルx高さ1.3メートル)、体に受ける抵抗力は約4分の1(流速4ノットで約200キログラム)にすぎない。
しかしなぜ鮮明な映像を得られなかったのか。クラブスターは約67メートル離れたところからスキャニングソナーでセウォル号の姿を撮った。このソナーは最大距離が150メートルで、水平面スキャンのみ可能だ。研究チームは1次調査が終った後、クラブスターに垂直方向のスキャンもできるよう同じ性能のソナー1台を追加で設置した。撮影距離が15メートルの超音波カメラを補完できるマルチビームソナー(最大距離50メートル)も追加した。しかし海洋警察はクラブスターがセウォル号に接近することを許可しなかった。母船が衝突する可能性があるからだ。
潜水士の死闘を代行するロボットはいつ頃?…セウォル号で見た海洋ロボットの現実(2)
【特集】韓国旅客船「セウォル」沈没事故
最新記事
포토뷰어
潜水士の死闘を代行するロボットはいつ頃?…セウォル号で見た海洋ロボットの現実(1)
2014.05.20 13:35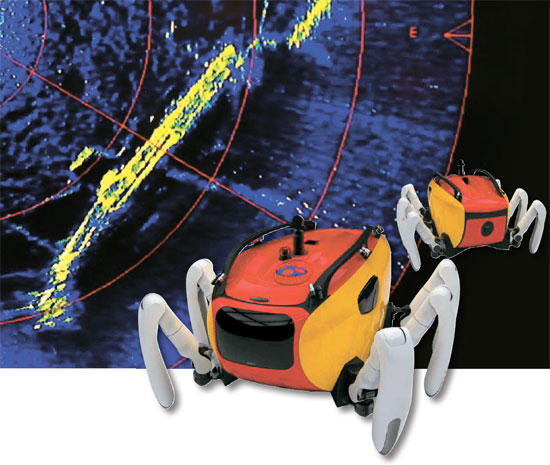
先月23日、クラブスター(右側)がスキャニングソナーで撮影したセウォル号の姿。